
La película «Viaje alucinante», y la novela homónima de Isaac Asimov, muestra un microsubmarino que recorre el interior de un cuerpo humano. Ingenieros coreanos han desarrollado microrrobots ciliados biocompatibles controlados mediante campos magnéticos. Podrían recorrer los fluidos internos de un cuerpo humano. Se fabrican con litografía láser 3D y sus cilios están recubiertos de una bicapa de níquel/titanio que permite su accionamiento magnético desde el exterior.
El movimiento de los cilios genera una fuerza de propulsión que permite controlar la posición y la orientación de los microrobots ciliados. En un futuro lejano se podrían usar en biomedicina, donde los microrrobots se moverán por los fluidos corporales. Terapias dirigidas con precisión, cirugía mínimamente invasiva o administración de fármacos están entre las diversas aplicaciones biomédicas que se pueden imaginar.
El artículo es Sangwon Kim, Seungmin Lee, …, Hongsoo Choi, «Fabrication and Manipulation of Ciliary Microrobots with Non-reciprocal Magnetic Actuation,» Scientific Reports 6: 30713 (29 Jul 2016), doi: 10.1038/srep30713. Por cierto, sobre natación en fluidos con bajo número de Reynolds recomiendo la charla de Sergio Palacios en Naukas Bilbao 2013, «#Naukas13 – Sergio L. Palacios: De vieiras, submarinos y espermatozoides,» Naukas, 05 Feb 2014.
https://www.youtube.com/watch?v=A93qV18c2hQ
En este vídeo se ilustra el control preciso de los microrrobots ciliados, que permite que dibujen letras con su movimiento. Por supuesto, se mueven en un fluido de bajo número de Reynolds. Todavía no se han introducido en el cuerpo de ningún ser vivo, ni siquiera en un laberinto de microfluidos. Pero no creo que falte mucho tiempo para que se realicen dichos experimentos.
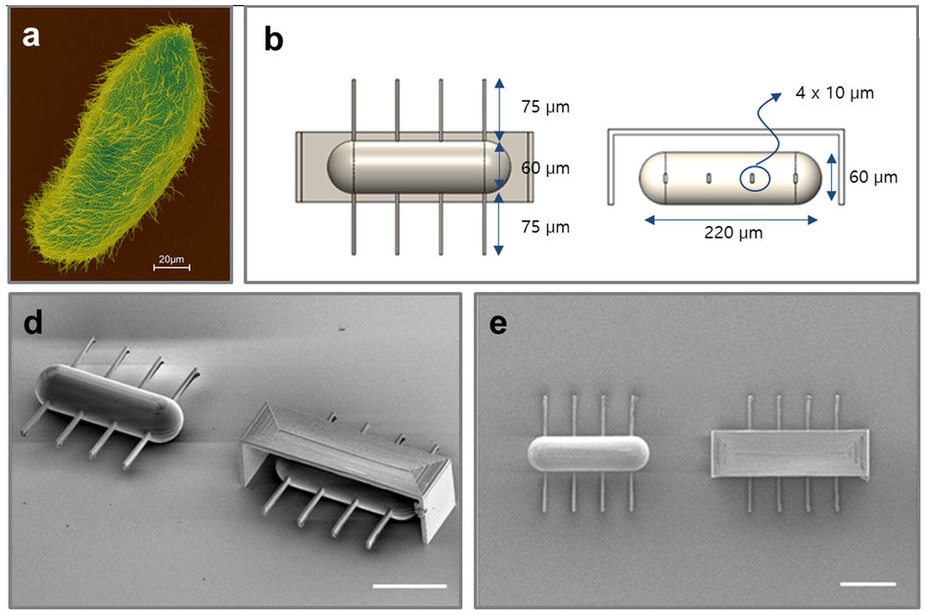
La ingeniería biomimética inspirada en los microorganismos parece el camimo más eficiente hacia un viaje alucinante como el de Asimov. Los nuevos microrrobots están inspirados en los paramecios. La clave de su natación es la actuación asimétrica de los cilios para dar lugar a un movimiento no recíproco. El cuerpo del microrrobot tiene una longitud de 220 μm y un diámetro de 60 μm. A ambos lados tienen cuatro cilios con una longitud de 75 μm y una sección transversal de 4 × 10 μm². Los cilios están recubiertos de una bicapa de 200 nm de titanio y 20 nm de níquel.
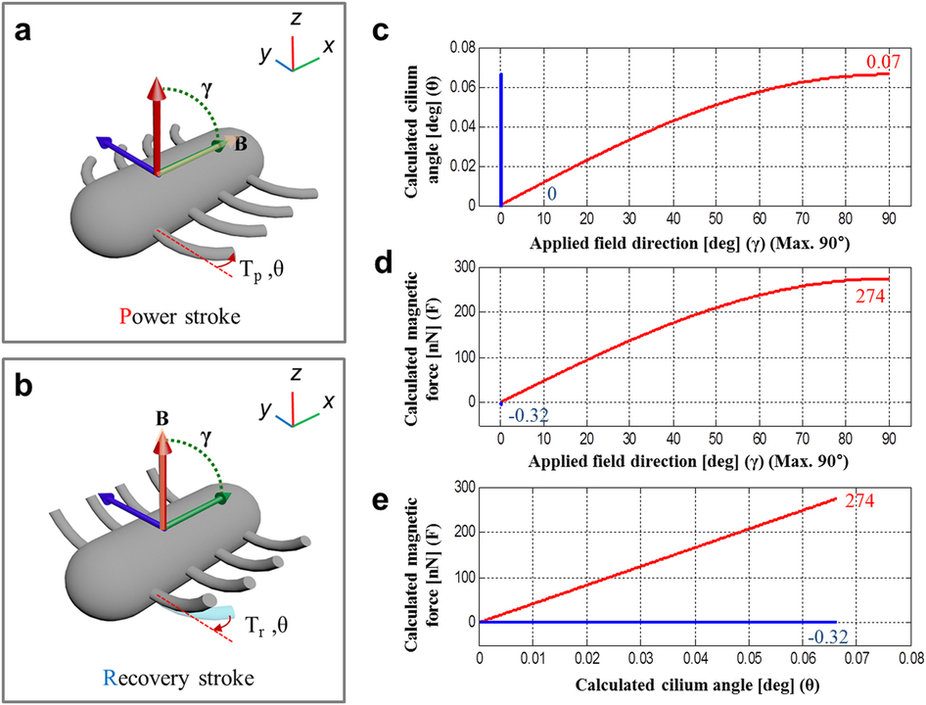
Para controlar el robot se usa un accionador electromagnético con ocho bobinas en una distribución hemisférica. Según la dirección del campo magnético aplicado en relación al eje longitudinal del robot los cilios se curvan hacia atrás (parte a de la figura) o hacia arriba (parte b de la figura). Mediante pulsos magnéticos se logra que los microrrobots naden en cierta dirección.
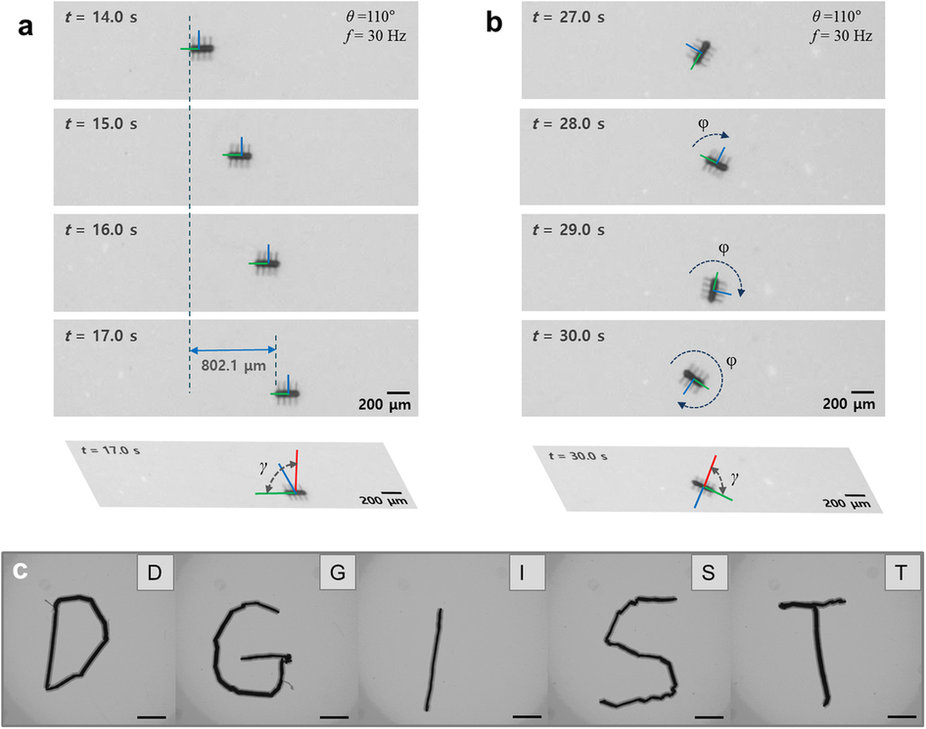
Como muestran el vídeo y esta figura, el control de la orientación del robot es muy preciso y permite dibujar letras (DGIST es el nombre del instituto coreano al que pertenecen los autores, Daegu Gyeongbuk Institute of Science and Technology). También se puede controlar la velocidad del microrrobot mediante el cambio de la frecuencia de pulsación de los campos magnéticos externos. En agua desionizada se alcanza una velocidad máxima de 340 μm/s (1,55 longitudes del cuerpo por segundo) bajo un campo magnético máximo de 9,5 mT que varía con una frecuencia de 60 Hz. La velocidad típica es de 165 μm/s (0,75 longitudes del cuerpo por segundo) con un campo magnético de 12 mT y una frecuencia de 45 Hz.
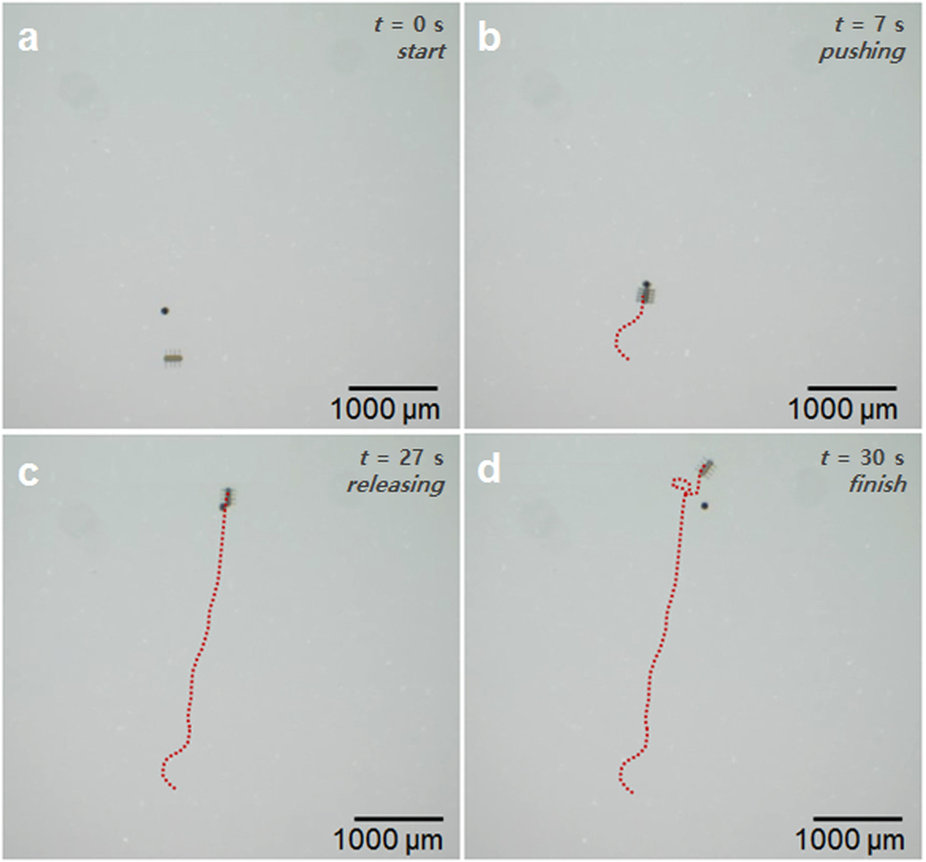
El microrrobot puede atrapar micropartículas, moverlas una cierta distancia y liberarlas en otro lugar, como ilustra esta figura (y la parte final del vídeo). Según los autores de este trabajo sus microrrobots ciliados son mucho más eficientes que los microrrobots cilíndricos y hexaédricos propuestos por otros autores.
En resumen, una propuesta muy curiosa e interesante, aunque todavía en la fase de prototipos. La biocompatibilidad de estos microrrobots permitirá futuros experimentos con cultivos de células. Por supuesto, para su uso in vivo, primero habrá que realizar pruebas de toxicidad in vitro. Aún así, el futuro en biomedicina de este tipo de tecnología biomimética es muy prometedor.
Empezando por el final, en este tipo de artículos no se hace nunca mención al mecanismo de eliminación de estos microrobots. Si hablamos de la sistema digestivo, el mecanismo parece obvio, pero no veo como podrían utilizarse en sistemas cerrados como el circulatorio sin crear otros problemas orgánicos (renales o hepáticos).
¿Estoy diciendo alguna tontería?
Saludos.
Como microbiólogo siempre pensé en cuan eficientes son las estructuras microbianas como los cilios o flagelos, y que compleja es su estructura. Me saco el sobrero frente a estos ingenieros