La Ciencia de la Mula Francis
El blog de Francisco R. Villatoro
Toggle navigation
MENU
MENU
Inicio
Tienda Naukas
Blogs Naukas
Naukas - Ciencia, escepticismo y humor
Tomates con genes - J. M. Mulet
La Ciencia de la Mula Francis - F. R. Villatoro
Experientia docet - César Tomé López
Zoo Logik - Juan Ignacio Pérez
La lista de la vergüenza - Fernando Frías
Eureka - Daniel Marín
Mati y sus mateaventuras - Clara Grima
El profe de física - Arturo Quirantes
La aldea irreductible - Javier Peláez
Ciencia en el bar - J. Sevilla y J. Armentia
Fuga de cerebros - Pablo Rodríguez
Universo rayado - El lobo rayado
Ciencia en blanco y negro - Eugenio Manuel
Otros mundos - Paco Bellido
Maikelnai´s blog - Miguel Artime
Farmagemma - Gemma del Caño
Gen-Ética - Lluís Montoliu
Suscríbete
Etiqueta: Biomimética
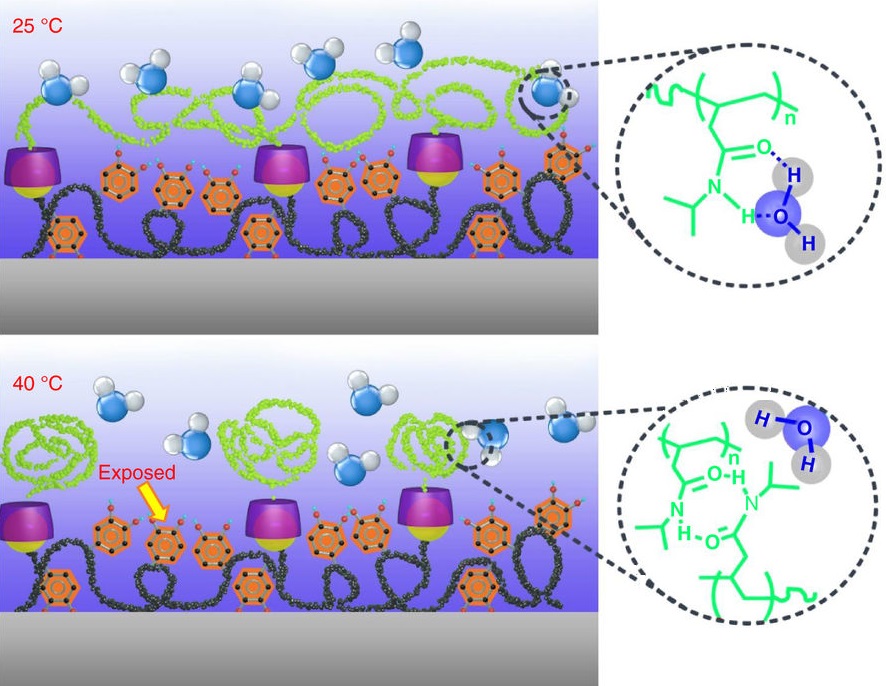
Un adhesivo bioinspirado que es reversible sumergido en agua
Ciencia
|
21 diciembre, 2017
Diseño mecánico estructural morfogenético de un ala de avión
Ciencia
|
6 octubre, 2017
Un pez de silicona que nada con una aleta caudal de elastómeros conductores
Ciencia
|
1 marzo, 2017
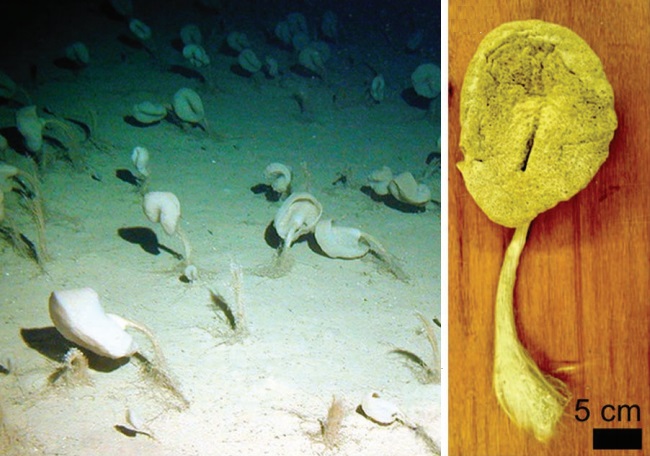
Generación de supercontinuo en las espículas de unas esponjas
Ciencia
|
2 octubre, 2016
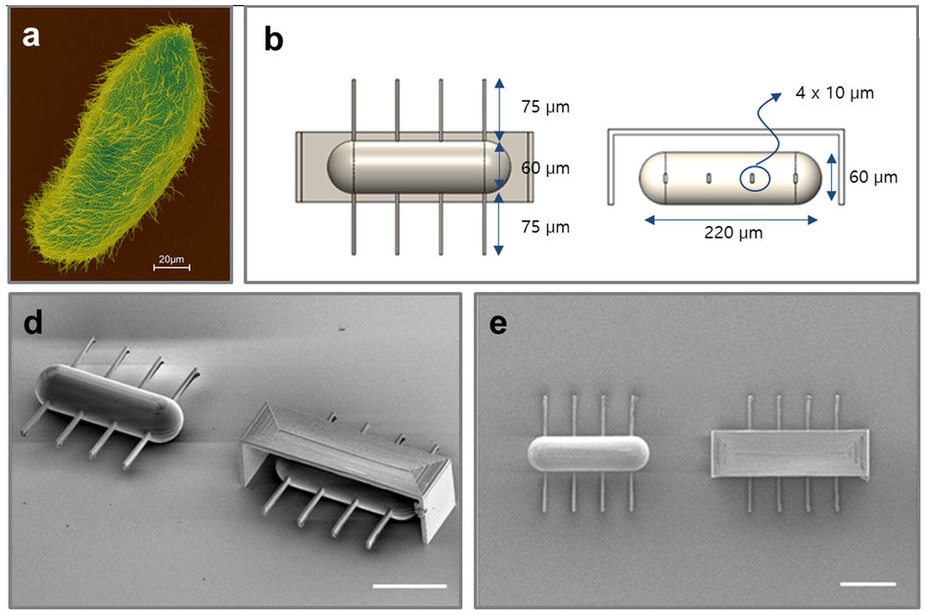
El viaje alucinante de los microrrobots ciliados biocompatibles
Ciencia
|
3 agosto, 2016
Seis microrrobots arrastran un automóvil
Ciencia
|
22 marzo, 2016
Francis en #rosavientos: Robots bioinspirados en cucarachas y pulpos
Biología
|
6 marzo, 2016
Francis en #rosavientos: El camuflaje de los peces en alta mar
Biología
|
22 noviembre, 2015
Pintura azul iridiscente que imita las alas de la mariposa Morpho
Ciencia
|
18 noviembre, 2015
Nuevo insecto robótico capaz de saltar sobre el agua
Biología
|
1 agosto, 2015
Un robot flexible tipo tentáculo como computador analógico
Ciencia
|
28 mayo, 2015
Cómo corren los somormujos sobre las aguas
Biología
|
2 mayo, 2015
1
2