
El sensor más caro de un vehículo autónomo es el LIDAR (siglas en inglés de Laser Imaging Detection And Ranging), análogo óptico al RADAR que usa ondas de radio y al SONAR que usa ondas acústicas. El LIDAR mide y detecta objetos mediante un láser infrarrojo que gira 360 grados sobre sí mismo; lo ideal es que sea ultrarrápido, ultrapreciso e integrado en un chip. Se publican en la revista Science dos nuevos diseños de LIDAR capaces de seguir a una bala a 150 m/s (540 km/h). Su diseño integrado basado en tecnología de solitones ópticos augura un futuro prometedor.
Para medir distancias un LIDAR usa la técnica del tiempo de vuelo: se compara una señal de referencia con otra señal emitida que rebota en un cuerpo lejano y retorna al sensor. Para un LIDAR rápido se usa un micropeine de frecuencias óptico, es decir, un tren de pulsos ultracortos. Se generan dos peines de frecuencias gemelos, uno que incide y rebota sobre el objeto lejano, y otro que sirve de referencia. Para generar los micropeines de frecuencias se usa un fenómeno no lineal, la inestabilidad modulacional, que amplifica el ruido de fondo y rompe un solitón ancho en un tren de solitones más delgados. Estos solitones se generan con una fibra óptica en forma de anillo cuyo núcleo es muy pequeño para que actúe el efecto Kerr y que actúa como un micorresonador (este diseño se suele llamar láser de solitones).
Los artículos son Myoung-Gyun Suh, Kerry J. Vahala, «Soliton microcomb range measurement,» Science 359: 884-887 (23 Feb 2018), doi: 10.1126/science.aao1968, arXiv:1705.06697 [physics.optics], y P. Trocha, M. Karpov, …, C. Koos, «Ultrafast optical ranging using microresonator soliton frequency combs,» Science 359: 887-891 (23 Feb 2018), doi: 10.1126/science.aao3924, arXiv:1707.05969 [physics.optics].

Los solitones ópticos se propagan en fibras ópticas monomodo gracias al equilibrio entre la dispersión lineal y el efecto Kerr no lineal, siempre bajo el efecto de la disipación (a veces se habla de solitones disipativos de Kerr, porque en rigor no son solitones). Todos estos efectos se describen mediante el índice de refracción (n), el cociente entre la velocidad de luz en el vacío (c) y en el medio transparente (v), siendo n=c/v. La dispersión es debida a que el índice de refracción depende de la frecuencia (por ello un prisma descompone la luz blanca en un arco iris de colores). El efecto Kerr es debido a la dependencia del índice de refracción con la intensidad de la luz; como la intensidad depende del cuadrado de la amplitud, se trata de un fenómeno no lineal. La disipación es debida a la absorción de la luz por el medio y se suele describir con una modificación compleja del índice de refracción real.
La fibra óptica es un medio unidimensional donde es muy fácil observar efectos no lineales, pues basta reducir el área del núcleo (entre 50−80 μm el umbral de potencia para los efectos no lineales es de solo unos pocos mW). Recuerda que en la fibra las señales ópticas se propagan por reflexión total interna, es decir, que el índice de refracción del núcleo se dopa para que sea mayor que el del revestimiento. Los fenómenos no lineales que aparecen en una fibra óptica son muy variados; discutirlos en detalle nos llevaría lejos, baste mencionar los asociados a la dispersión, como la dispersión estimulada de Raman (Stimulated Raman Scattering, SRS) y la dispersión estimulada de Brillouin (Stimulated Brillouin Scattering, SBS), y al efecto Kerr, como la automodulación de fase (Self-Phase Modulation, SPM), el mezclado de cuatro ondas (Four Wave Mixing, FWM), la modulación de fase cruzada (Cross Phase Modulation, XPM), la inestabilidad modulacional (Modulational Instability, MI) y dispersión entre pulsos de Raman (Intrapulse Raman Scattering, IRS). Todos estos fenómenos actúan sobre los solitones que se propagan en la fibra.
 Un anillo de fibra óptica actúa como un microrresonador óptico. Al inyectar una señal de un láser en continua (CW) actúa la inestabilidad modulacional que amplifica la señal de ruido de fondo; la intensidad creciente de la señal supera el umbral en el que empiezan a actuar los efectos no lineales y aparece un solitón. Su intensidad sigue creciendo y debido a los efectos disipativos este solitón se acaba descomponiendo en un tren de pulsos ultracortos que tienen hacia un tren de solitones ultracortos. Hay que recordar que este fenómeno está relacionado con la generación de luz supercontinua (el llamado láser blanco), que genera un espectro muy ancho a partir de un pulso picado en el espectro.
Un anillo de fibra óptica actúa como un microrresonador óptico. Al inyectar una señal de un láser en continua (CW) actúa la inestabilidad modulacional que amplifica la señal de ruido de fondo; la intensidad creciente de la señal supera el umbral en el que empiezan a actuar los efectos no lineales y aparece un solitón. Su intensidad sigue creciendo y debido a los efectos disipativos este solitón se acaba descomponiendo en un tren de pulsos ultracortos que tienen hacia un tren de solitones ultracortos. Hay que recordar que este fenómeno está relacionado con la generación de luz supercontinua (el llamado láser blanco), que genera un espectro muy ancho a partir de un pulso picado en el espectro.
Los peines de frecuencias se usan mucho en los LIDAR. Los dos nuevos diseños usan micropeines de frecuencia de más de 10 terahercios; un ancho de banda tan amplio permite medidas muy rápidas de alta precisión. Por supuesto, la resolución espacial depende de la distancia recorrida por el pulso; para los experimentos con una bala se han logrado resoluciones de unos 2 μm para velocidades de 150 m/s; la velocidad de adquisición de puntos es de 10,4 ns por punto (para la bala se obtuvieron medidas durante ~12 ms).

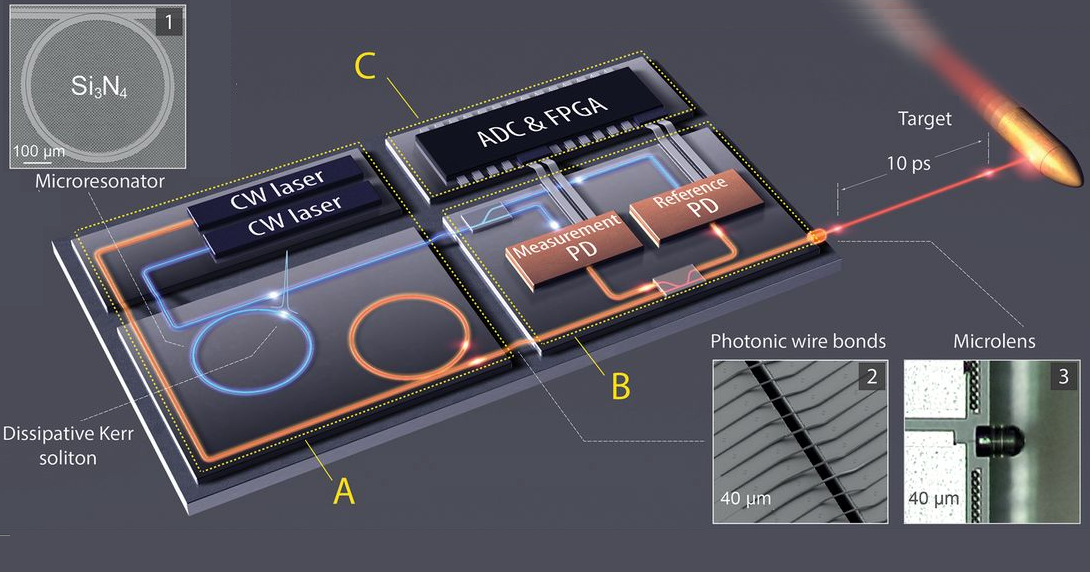
El nuevo LIDAR usa dos anillos láser de nitruro de silicio (Si3N4) que producen sendos trenes de solitones disipativos de Kerr (DKS) gemelos, llamado sistema Dual-DKS. Uno de los trenes de solitones se dirige mediante un colimador y una microlente hacia el objeto a esplorar; la luz reflejada se recoge por el mismo sistema. Esta figura incluye la foto de la bala, cuya peculiar forma se ha podido reconstruir en vuelo a partir de las medidas del nuevo LIDAR.
En resumen, lo más relevante desde el punto de vista de las aplicaciones es que los dos nuevos diseños de LIDAR de alta precisión y alta velocidad se pueden integrar en chip; gracias a ello su tamaño será muy reducido y su coste será asequible, si se logra su producción industrial en masa (por ahora solo se dispone de prototipos de laboratorio). Hay otros diseños de LIDAR que no usan tecnología basada en solitones ópticos, pero para quienes trabajamos en este tema son mucho menos atractivos. Solo el mercado tendrá la última palabra, pero quizás los futuros automóviles sin conductor que recorran nuestras carreteras usen solitones ópticos.
No sabía que era tan caro el LIDAR, quizás por eso algunos pocos lo están intentando con cámaras normales + RADAR. Queda ver si la IA con las cámaras puede proveer un mapa del exterior del vehículo como puede hacerlo un LIDAR…
Buenísimo artículo, esta aplicación deja a los actuales rotoscanners láser a la altura de un juguete. Veo muchísima aplicabilidad en los sistemas de robótica colaborativa.
Excelente y muy interesante!!! Y bien explicado… Cuanto cuesta un LIDAR actual?
Carlos, los hay desde unos 600€ (según puedo leer buscando en Google).
Un problema añadido a estos sistemas, es la enorme potencia de proceso que deben de necesitar.