
Para estudiar el comportamiento de cada estornino en un bando se puede usar la imagen estereoscópica. Dos (o mejor tres) cámaras separadas pueden filmar el mismo bando de estorninos. Mediante técnicas de seguimiento fotograma a fotograma y técnicas de triangulación se puede determinar la posición tridimensional de cada estornino. El proyecto europeo STARFLAG es un buen ejemplo de cómo hacerlo con éxito.
Se ha demostrado que cada estornino sólo sigue la pista de otros seis estorninos cercanos para que el bando emerja como una unidad global. Nos lo recordaba Antonio José Osuna Mascaró (aka Biotay), «El séptimo estornino,» Naukas, 26 Mar 2015, que cita a Andrea Cavagna, Irene Giardina, «The seventh starling,» Significance 5: 62-66, 29 May 2008, doi: 10.1111/j.1740-9713.2008.00288.x (open access). Aunque ya hablé sobre este tema en «Por qué en una bandada de estorninos cada uno está rodeado por otros siete,» LCMF, 14 Feb 2013, me gustaría mencionar un poco la reconstrucción 3D de las trayectorias.
Más información técnica en Andrea Cavagna et al., «The STARFLAG handbook on collective animal behaviour: Part I, empirical methods,» Animal Behaviour 76: 217-236, 2008, doi: 10.1016/j.anbehav.2008.02.002, arXiv:0802.1668 [q-bio.QM]; «Part II, three-dimensional analysis,» Animal Behaviour 76: 237-248, 2008, doi: 10.1016/j.anbehav.2008.02.003, arXiv:0802.1674 [q-bio.QM].

El proyecto STARFLAG (STARlings in FLight: understanding the patterns of Animal Group movement) ha logrado una reconstrucción 3D de la trayectoria de la mayoría de los estorninos en una bandada que consta de miles de aves. El problema no es difícil en principio, de hecho, en 1965 ya se logró hacer a mano con fotografías estéreo de bandadas pequeñas de palomas (con unos diez ejemplares) y en 1978 con hasta 55 aves. En imágenes de vídeo las primeras reconstrucciones son de 1992 (11 palomas), 1994 (20 mosquitos), 1998 (61 avefrías), etc.

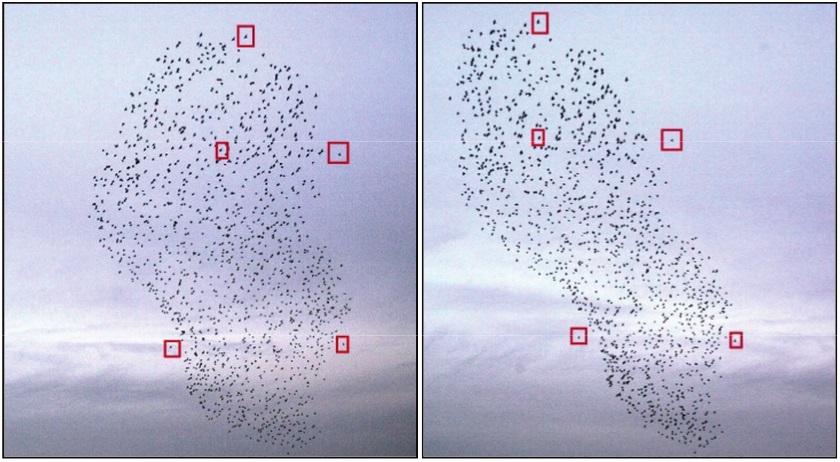
La gran novedad del proyecto STARFLAG es que se usan imágenes en vídeo en un entorno natural. Gracias a ello se pueden comparar los resultados de modelos por ordenador con las observaciones de campo. Por supuesto se han tenido que resolver muchos problemas prácticos. Las imágenes de los pájaros son muy similares entre sí (a unos 100 metros cada pájara ocupa entre 5 y 15 píxeles en la imagen) y en los cruces de sus trayectorias se pueden producir errores de asociación. Se usan cámaras comerciales (Canon EOS 1D Mark II con lentes de 35 mm) situadas sobre trípodes en el tejado de un edificio público, cuya calibración rigurosa es complicada (no son instrumentos de precisión). La situación atmosférica y meteorológica influye mucho en la calidad de las imágenes. Aunque se usa un láser para determinar la distancia la bando de aves, trabajar en el campo en lugar de un laboratorio (o bajo condiciones controladas) dificulta todo el procesado de imágenes. Estos y muchos otros factores se han tenido que tener en cuenta en la reconstrucción de las trayectorias de los estorninos.
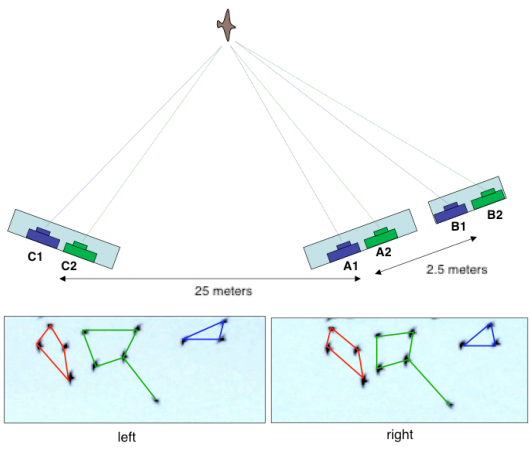
Para resolver todas las dificultades se han usado varias técnicas novedosas. Por un lado se han duplicado todas las cámaras. Por otro lado en lugar de usar un método bifocal (con dos parejas de cámaras separadas unos 25 metros) se ha usado un método trifocal (con la tercera pareja a unos 2,5 metros de una de ellas). De esta manera se resuelve el problema de triangulación mediante un método de minimización que aprovecha la información redundante de las cámaras adicionales (este método se usa en la captura de imágenes 3D en el cine en películas como Matrix). No quiero entrar en detalles técnicos sobre geometría epipolar (la geometría de la visión estereoscópica) y la resolución numérica de la matriz fundamental. Los interesados pueden buscar información en la web sobre estos términos.
Para seguir la trayectoria de un individuo se descompone su movimiento en dos partes. Por un lado el movimiento del bando como un todo (sistema de referencia global). Y por otro lado, se predice su posición en el fotograma a partir de su movimiento en los fotogramas anteriores (sistema de referencia local). Mediante técnicas de flujo de imágenes (muy usadas en el análisis de marcadores en física de fluidos) se siguen las trayectorias individuales de las aves. Por supuesto, las dificultades técnicas son grandes, pero los resultados obtenidos son espectaculares.
En resumen, si te interesan las técnicas de reconstrucción de imágenes en movimiento, seguro que te gustarán los artículos derivados del proyecto STARFLAG.
Estupendo artículo y como nota curiosa el tratamiento de «bandadas» en la novela «El Invencible» de Stanislav Lem. Saludos.
Este tipo de conclusiones son sólo el primer paso, lo siguiente es encontrar patrones, si los hay, del comportamiento de la bandada. Es decir, por qué las bandadas hacen esos movimientos tan alucinantes, con esos cambios de densidad y demás, como si fueran algo vivo:
https://www.youtube.com/watch?v=ctMty7av0jc
En el caso del vídeo la bandada estaba siendo atacada por dos halcones.