
Ya está disponible el audio del podcast de Eureka, mi sección en La Rosa de los Vientos de Onda Cero. Como siempre, una transcripción, unos enlaces y algunas imágenes.
Los robots bioinspirados están de moda, desde robots que imitan a las cucarachas a otros que imitan a los pulpos. Las cucarachas son insectos que generan mucho rechazo, pero su velocidad de movimientos y su gran habilidad para esconderse en cualquier rendija podría ser muy útil en tareas de salvamento para localizar y ayudar a rescatar a víctimas. Se publica en PNAS el diseño de un prototipo de robot cuyos movimientos están inspirados en las cucarachas. Por otro lado, se publica en la revista Science el desarrollo de una piel artificial que se estira, siente la presión ejercida sobre ella y emite luz de una manera similar con la que funciona la de cefalópodos como el pulpo. La elasticidad de este material sobrepasa lo conseguido hasta ahora.
Los artículos son Kaushik Jayaram, Robert J. Full, «Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot,» PNAS 113: E950–E957 (23 Feb 2016), doi: 10.1073/pnas.1514591113; y C. Larson et al., «Highly stretchable electroluminescent skin for optical signaling and tactile sensing,» Science 351: 1071-1074 (04 Mar 2016), doi: 10.1126/science.aac5082.
Más información divulgativa en Antonio Martínez Ron (@aberron), «Robots-cucaracha al rescate,» Next, Vozpópuli, 08 Feb 2016; Teresa Guerrero (@teresaguerrerof), «Un robot cucaracha al rescate,» Ciencia, El Mundo, 08 Feb 2016; «Piel de pulpo para robots futuristas», Agencia SINC, 03 Mar 2016.
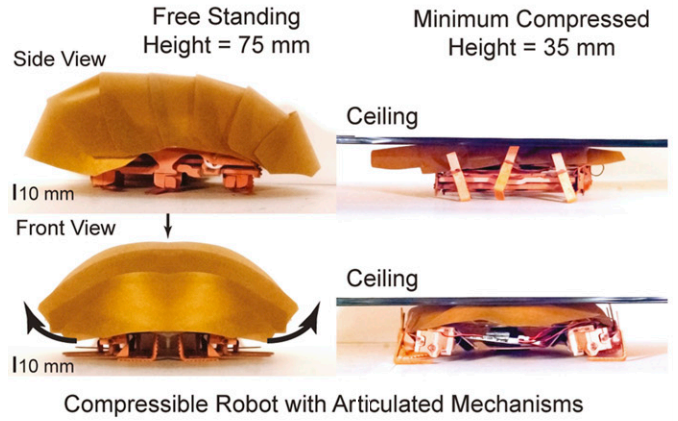
Muchos animales realizan tareas que parecen imposibles y son inspiración para los ingenieros que trabajan en robótica. La cucaracha es un insecto que provoca mucho rechazo en los hogares, pero es muy hábil para meterse a gran velocidad en cualquier rendija y esconderse para poner sus huevos. ¿Hay robots capaces de lograr tal hazaña? La evolución tras millones de años de selección natural ha dotado a muchos animales de capacidades que parecen extraordinarias a nuestros ojos. Los ingenieros que trabajan en biomimética se inspiran en estas habilidades de ciertos animales para lograr hazañas que de otra manera rayan lo imposible. Las cucarachas son insectos de cuerpo aplanado capaces de colarse por casi cualquier rendija a gran velocidad. Se conocen más de 4500 especies de blatodeos que han evolucionado desde hace unos 300 millones de años en el periodo Carbonífero. En España es muy común la cucaracha común americana o cucaracha roja (Periplaneta americana), originaria de África tropical. Puede llegar a medir hasta 4 cm de longitud, pero lo más sorprendente es que puede replegar su altura normal de unos 1,3 cm hasta solamente 3 mm. Gracias a ello puede colarse a toda velocidad por rendijas muy estrechas. Un equipo de ingenieros de la Universidad de Berkeley, en California, ha publicado en la revista Proceedings of the National Academy of Sciences (PNAS) el diseño de un pequeño robot inspirado en la cucaracha americana que podría ser usado en tareas de rescate y salvamento, a la hora de localizar víctimas entre escombros. Además de su flexibilidad, las cucarachas son muy resistentes, siendo capaces de sobrevivir a la compresión con fuerzas hasta 900 veces mayores que su propio peso. El nuevo robot ‘cucaracha’ trata de imitar la flexibilidad del cuerpo de estos insectos y su velocidad al moverse por grietas estrechas.
Inspirarse en animales para diseñar robots no es algo nuevo y existen muchos grupos de investigadores que se inspiran en la forma en la que ciertas especies caminan, saltan o se deslizan. ¿Cómo logra el robot cucaracha atravesar grietas estrechas a gram velocidad? La cucaracha combina dos estrategias evolutivas. Por un lado tiene un exoesqueleto muy flexible que le permite penetrar en griesta muy estrechas. Y por otro lado puede replegar sus patas sin afectar a la velocidad de sus movimientos dentro de una grieta aprovechando la fricción de su cuerpo con las paredes. El prototipo del nuevo robot ‘cucaracha’ desarrollado por Kaushik Jatyaram y Robert J. Full, del departamento de Biología Integrativa de la Universidad de California en Berkeley, han desarrollado un pequeño robot llamado CRAM (robot compresible con mecanismos articulados, por sus siglas en inglés). El prototipo cabe en la palma de una mano, tiene un cuerpo flexible y puede plegar sus patas robóticas para meterse por rendijas que miden menos de la la mitad de su tamaño. Su cuerpo flexible que se inspira en el origami, el arte japonés de la papiroflexia que consiste en doblar un papel para formar figuras, está recubierto por una especie de coraza sintética formada por diferentes capas de un material plástico. Lo más curioso es el mecanismo articulado que permite el movimiento de sus patas que se inspira en la cucaracha americana. Los investigadores de la Universidad de California en Berkeley llevan muchos años estudiando los movimientos rápidos y ágiles de las cucarachas y ya presentaron otro prototipo de robot ‘cucaracha’ hace siete años que era capaz de moverse hasta 20 veces la longitud de su cuerpo por segundo, en concreto, unos 1,5 metros por segundo. El nuevo robot es capaz de lograr alcanzar esta velocidad incluso tras comprimir su cuerpo entre un 40% y un 60%. Por supuesto, en las grietas más pequeñas (el robot CRAM ha llegado a cruzar una grieta de sólo 4 mm) debe reducir su velocidad, pero aún así, sorprende lo rápido que se mueve. La gran versatilidad de las cucarachas y de su versión robótica para moverse a gran velocidad en espacios confinados promete gran número de aplicaciones civiles. Por ejemplo, para encontrar personas vivas en un derrumbe, o para el control de materiales peligrosos para el medio ambiente, o para la inspección de defectos estructurales en construcciones. Todavía estamos hablando de prototipos, pero seguro que no falta mucho tiempo que para que podamos ver a estos robots en labores de rescate y salvamento.
Estos robots inspirados en animales tan escurridizos como las cucarachas podrían tener aplicaciones militares o de espionaje. ¿Se sabe algo sobre este tipo de aplicaciones? El equipo de investigadores de la Universidad de Berkeley, en California, que ha desarrollado el robot CRAM ha afirmado a varios medios que no reciben financiación militar y que su robot no está pensado para tareas de espionaje. En el desarrollo del prototipo ha colaborado la empresa Dash Robotics, un spin-off de la Universidad de Berkeley, que afirma que no está interesada en aplicaciones militares. Para dichas labores se está trabajando en el desarrollo de cucarachas cyborg, animales vivos cuyos movimientos se controlan por control remoto. Se coloca una especie de mochila con conexiones directas a las neuronas de las cucarachas envían información a su sistema nervioso mediante impulsos eléctricos permitiendo un control de sus movimientos. Estas mochilas pueden tener sensores que permiten el uso de estos insectos en labores de espionaje. El uso civil de estas cucarachas cyborg está muy restringido por cuestiones bioéticas, pero en un entorno de defensa dichas cuestiones tienen menor peso. Por ello, en aplicaciones militares o de espionaje en lugar de diseñar robots inspirados en los insectos se está trabajando bastante en usar los insectos vivos como si fueran robots.
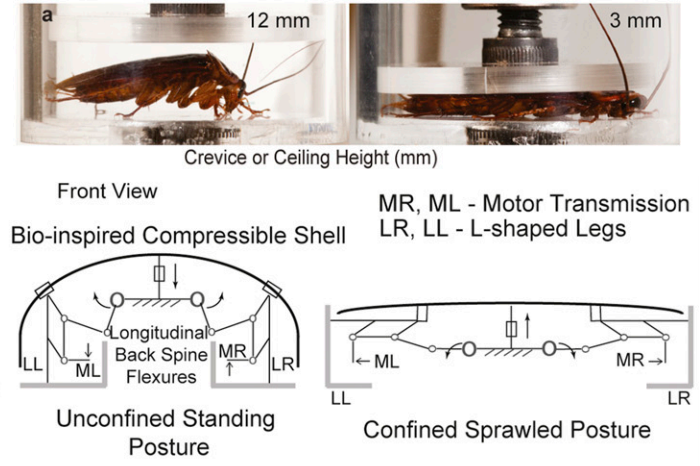
Hay animales con habilidades asombrosas, como los pulpos, cuya piel elástica puede cambiar de color en cuestión de segundos para mimetizarse y desaparecer a la vista de sus depredadores. ¿Se está investigando en el desarrollo de una piel artificial que se asemeje a la de los pulpos? La epidermis de estos cefalópodos es realmente asombrosa y ha sido de inspiración para muchos bioingenieros. Esta semana ha sido noticia un equipo de investigadores de la Universidad de Cornell (EE UU), dirigido por Robert Shepherd, profesor de ingeniería mecánica y aeroespacial, que han desarrollado una epidermis artificial capaz de estirarse hasta seis veces su tamaño normal, que está recubierta de sensores de presión y que es electroluminiscente, es decir, es capaz de emitir luz y de cambiar de color. Esta piel similar a la de los pulpos podrá colocarse sobre robots blandos, pudiendo mostrar información en su piel como si se tratara de una pantalla de vídeo. Muchos expertos en robótica consideran que los robots blandos son más amigables y se adaptan mejor a la interacción con humanos. La conexión emocional entre las personas y los robots es un factor importante a considerar para la integración de los robots en nuestro ámbito cercano. Una piel blanda que cambie de color en respuesta al estado de ánimo del robot facilitará las interacciones humano-robot. La piel creada por Shepherd y su equipo usa un condensador hiperelástico emisor de luz (HLEC, en sus siglas en inglés) basado en electrodos de sulfuro de zinc combinados con diversos metales de transición insertados en un matriz de silicio recubierta por un hidrogel. El resultado es un material de gran elasticidad, capaz de expandirse hasta en un 500% sin que los electrodos pierdan su conexión eléctrica dentro del hidrogel. Este tipo de piel artificial es mucho más elástica que otros emisores de luz ya existentes que están basados en semiconductores orgánicos. Además, los condensadores hiperelásticos pueden actuar como sensores que pueden detectar deformaciones producidas por presión y estiramiento. Los investigadores sueñan con robots que puedan responder hasta a las caricias humanas. Sus aplicaciones son múltiples en atención de la salud, transporte, comunicación electrónica y otras áreas. La robótica y la ingeniería bioinspiradas tienen un futuro muy prometedor.
Está muy bien e interesante el usar este tipo de artilugios para la localización de personas en derrumbes pero no creo que sea muy agradable enconrarte una «cucaracha» miestras no puedes seguramente ni moverte, posiblemente acaben muriendo de pánico antes que de aplastamiento…
El uso de las cucarachas tele dirigidas para el espionaje (cucarachas ciborg) salió en los medios a principios de los 90, junto con otros mecanismos de espionaje telefónico y diseños de aviones espía (pondría la mano en el fuego que fue en un Muy Interesante de esa década donde leí sobre las cucarachas). Obviamente cuando salen a la luz es justamente cuando prácticamente no se utilizan; todos estos sistemas tuvieron su momento de gloria en los 70 y 80.
Pondría ahora la otra mano en el fuego (espero no quedarme sin manos) a que después de 20 años, ni de coña marinera andan aun criando cucarachas en ningún centro de inteligencia (excepto en España, donde no pongo nada en el fuego); se deben de estar usando otros medios mucho más sofisticados; la ingeniería militar siempre anda por delante.
Por cierto, Francis, una pregunta, ¿alguna vez, debido a tu buen currículo académico, has sido tentado para trabajar en proyectos de inteligencia? (música de James Bond)
No, Pedro, he firmado acuerdos de confidencialidad en trabajos con empresas y he trabajado en temas de inteligencia artificial, pero no en el sentido de «inteligencia» al que te refieres.
Francis, ¿Qué sabes de esto???
«Supernova ‘standard candles’ not so standard after all» (https://cosmosmagazine.com/space/supernova-standard-candles-not-so-standard-after-all?utm_source=This+Week+in+Cosmos&utm_campaign=d3961dd079-TWIC_Mar_7_2016&utm_medium=email&utm_term=0_1df827744a-d3961dd079-179593713).
Parece ser un español en España el protagonista de la historia: «…Manuel Moreno-Raya from the Spanish Research Centre for Energy, Environment and Technology and colleagues…)
Abuela, mi amigo Ángel R. López-Sánchez es uno de los autores del estudio. Como es de esperar, la galaxia en la que esté una supernova Ia puede influir en su luminosidad aparente (esto ya había sido predicho en 2010). En las galaxias ricas en metales hay que introducir una corrección en la medida de distancias.
Esto no afecta a la existencia de la energía oscura. Solo indica que hay que separar la población de supernovas Ia que se usan en medida de distancias en varias familias, dependiendo del tipo de galaxia en la que se encuentran. Nada más y nada menos. Por cierto, gracias a esta separación se obtendrán mejores medidas astrofísicas de la energía oscura en los «telescopios» de energía oscura.
Saludos
Francis